Seagate Barracuda 2.5 SATA ST5000LM000 User Guide
Content
Introduction
The Minn Kota Talon Tilt Bracket is an essential accessory for enhancing the functionality of your boat's shallow water anchoring system. Designed for use with the Talon shallow water anchor, this bracket allows for easy tilting and adjustment, ensuring optimal performance in various water conditions. Its durable construction guarantees long-lasting use, while the straightforward installation process makes it user-friendly. Priced at approximately $100, it provides an effective solution for anglers seeking stability and convenience on the water.
Document Revision History
Revision | Date | Pages affected and Description of change |
Rev. A | 07/19/2016 | Initial release. |
Rev. B |
09/06/2016 | 6 & 8: Changed Weight (typical) to Weight (max) 13: Removed '2004/108/EC (Until 19th April, 2016) and' & '(From 20th April, 2016)' 13: Modified EMC Standard from EN55022 to EN55032 13: Added Korean text for Class B device warning |
Rev. C |
10/10/2016 | fc: Applied BarraCuda logo and Added model numbers 10: Added bullets to Section 2.8.1 Power consumption 10: Updated Table 4 DC Power Requirements 13: Updated to MSIP Korean text for Class B device warning |
Rev. D |
11/17/2016 | 5: Revised bullet list 6 & 8: Revised Data transfer rate = 140MB/s 6 & 10: Start-up current = 1.2A 10: Updated Section 2.8.1 11: Added Section 2.8.4 |
This manual describes the functional, mechanical and interface specifications for the following: Seagate® BarraCuda® model drives:
Standard models | ||
ST5000LM000 | ST4000LM024 | ST3000LM024 |
These drives provide the following key features:
- 128MB buffer.
- 5400-RPM spindle speed.
- 650 Gs of non-operating shock and 300 Gs of operating shock.
- Full-track multiple-sector transfer capability without local processor intervention.
- High instantaneous (burst) data-transfer rates (up to 6Gb/s).
- MTC TechnologyTM, proprietary data flow management.
- Native Command Queuing (NCQ) with command ordering.
- Quiet operation with Fluid Dynamic Bearing (FDB) motor.
- SeaToolsTM diagnostic software performs a drive self-test that eliminates unnecessary drive returns.
- Shingled magnetic recording with perpendicular magnetic recording heads/media.
- State-of-the-art cache and on-the-fly error-correction algorithms.
- Support for Read Multiple and Write Multiple commands.
- Support for S.M.A.R.T. drive monitoring and reporting.
- Worldwide Name (WWN) capability uniquely identifies the drive.
About the Serial ATA Interface
The Serial ATA interface provides several advantages over the traditional (parallel) ATA interface.
The primary advantages include:
- Easy installation and configuration with true plug-and-play connectivity. It is not necessary to set any jumpers or other configuration options.
- Thinner and more flexible cabling for improved enclosure airflow and ease of installation.
- Scalability to higher performance levels.
In addition, Serial ATA makes the transition from parallel ATA easy by providing legacy software support. Serial ATA was designed to allow users t o install a Serial ATA host adapter and Serial ATA disk drive in the current system and expect all of the existing applications to work as normal.
The Serial ATA interface connects each disk drive in a point-to-point configuration with the Serial ATA host adapter. There is no master/slav e relationship with Serial ATA devices like there is with parallel ATA. If two drives are attached on one Serial ATA host adapter, the host operating system views the two devices as if they were both “masters” on two separate ports. This essentially means both drives behave as if they are Device 0 (master) devices.
Note: The host adapter may, optionally, emulate a master/slave environment to host software where tw o devices on separate Serial ATA ports are represented to host software as a Device 0 (master) and Device 1 (slave) accessed at the same set of host bus addresses. A host adapter that emulates a master/slav e environment manages two sets of shadow registers. This is not a typical Serial ATA environment.
The Serial ATA host adapter and drive share the function of emulating parallel ATA device behavior to provide backward compatibility with existing host systems and software. The Command and Control Block registers, PIO and DMA data transfers, resets, and interrupts are all emulated.
The Serial ATA host adapter contains a set of registers that shadow the contents of the traditional device registers, referred to as the Shadow Register Block. All Serial ATA devices behave like Device 0 devices.
Specifications
Unless otherwise noted, all specifications are measured under ambient conditions, at 25°C, and nominal power. For convenience, the phrases th e drive and this drive are used throughout this manual to indicate the following drive models:
The specification summaries listed in the following tables are for quick reference.
Specification Summary
Table 1 Drive Specifications Summary
| Drive Specification | ST5000LM000 | ST4000LM024 | ST3000LM024 |
| Formatted capacity 1 | 5000GB | 4000GB | 3000GB |
| Guaranteed sectors | 9,767,541,168 | 7,814,037,168 | 5,860,533,168 |
| Heads | 10 | 10 / 8 | 8 |
| Disks | 5 | 5 / 4 | 4 |
| Bytes per sector | 512 (logical) / 4096 (physical) | ||
| Recording density | 2254 Kb/in | ||
| Track density | 580 Ktracks/in avg | ||
| Areal density | 1307 Gb/in2 avg | ||
| Spindle speed | 5400 RPM | ||
| Data transfer rate (up to) | 140 MB/s | ||
| Interface | SATA 6Gb/s | ||
ATA data-transfer modes supported | PIO modes 0–4 Multiword DMA modes 0–2 Ultra DMA modes 0–6 | ||
| Cache buffer | 128 MB | ||
| Height | 15.0 +0.5/- 0.25 mm (0.59 +0.002/-0.010 in) | ||
| Width | 69.85 +/- 0.25 mm (2.750 +/- 0.010 in) | ||
| Length | 100.35 +0.20 / -0.25 mm (3.951 +0.008 / -0.010 in) | ||
| Weight (max) | 190 g (0.42lb) | ||
| Average latency | 5.6 ms | ||
| Startup current, Max (+5V) | 1.2A | ||
| Voltage tolerance (including noise) | 5V ± 5% | ||
| Operating temperature | 0° to 60°C | ||
| Non-operating temperature (Ambient) | –40° to 70°C | ||
| Temperature gradient (max) | 20°C per hour max (operating) 35°C per hour max (non-operating) | ||
| Relative humidity | 5% to 95% (operating) 5% to 95% (non-operating) |
| Relative humidity gradient | 20°C per hour max (operating) 30°C per hour max (non-operating) |
| Wet bulb temperature (max) | 37.7°C max (operating) 40.0°C max (non-operating) |
| Altitude, operating | –304.8 m to 3048 m (–1000 ft to 10,000+ ft) |
Altitude, non-operating (below mean sea level, max) | –304.8 m to 12,192 m (–1000 ft to 40,000+ ft) |
| Operational Shock | 300 Gs at 2 ms max |
| Non-Operational Shock | 650 Gs at 1 ms max |
| Vibration, operating | 5–500 Hz: 0.7 Grms |
| Vibration, non-operating | 5–500 Hz: 3.52 Grms |
| Nonrecoverable read errors | 1 per 1014 bits read |
Rated workload | Average annualized workload rating: <55 TB/year. The AFR specification for the productassumes the I/O workload does not exceedthe average annual- ized workload rate limit of 55 TB/year. Workloads exceeding the annualized rate may degrade the product AFRand impact reliability as experienced by the particular application. The averageannual- ized workload ratelimit is in units of TB per calendar year. |
Warranty | To determine the warranty for a specific drive, use a web browser to access the following web page: http://www.seagate.com/support/warranty-and-replacements/. From this page, click on the “Is my Drive under Warranty” link. The following are required to be pro- vided: the drive serial number, model number (or part number) and country of purchase. The system will display the warranty information for the drive. |
| Load-unload cycles | 600,000 at 25°C, 50% rel. humidity |
Supports Hotplug operation per the Serial ATA Revision 3.2 specification | Yes |
- One GB equals one billion bytes when referring to hard drive capacity. Accessible capacity may vary depending on the operating environment and formatting.
Formatted Capacity
| Model | Formatted Capacity1 | Guaranteed Sectors | Bytes per Sector |
| 5TB models | 5000 GB | 9,767,541,168 |
512 (logical) / 4096 (physical) |
| 4TB models | 4000 GB | 7,814,037,168 | |
| 3TB models | 3000 GB | 5,860,533,168 |
- One GB equals one billion bytes when referring to hard drive capacity. Accessible capacity may vary depending on the operating environment and formatting.
LBA mode
When addressing these drives in LBA mode, all blocks (sectors) are consecutively numbered from 0 to n–1, where n is the number of guaranteed sectors as defined above.
Refer to Unpacking, Configuring and Mounting the Drive on page 17 (words 60-61 and 100-103) for additional information about 48-bit addressing support of drives with capacities over 137 GB.
Physical organization
Drive model | Read/write heads | Number of discs |
| 5TB models | 10 | 5 |
| 4TB models | 10 / 8 | 5 / 4 |
| 3TB models | 8 | 4 |
Recording and Interface Technology
| Interface | Serial ATA (SATA) |
| Recording method | Perpendicular |
| Recording density | 2254 Kb/in |
| Track density | 580 Ktracks/in avg |
| Areal density | 1307 Gb/in2 avg |
| Spindle speed | 5400 RPM |
| Data transfer rate (up to) | 140 MB/s |
| Interface | SATA 6Gb/s |
Physical Characteristics
All models | Height | 15.0 +0.5/- 0.25 mm (0.59 +0.008/-0.010 in) |
Width | 69.85 +/- 0.25 mm (2.750 +/- 0.010 in) | |
Length | 100.35 +0.20 / -0.25 mm (3.951 +0.008 / -0.010 in) | |
Weight (max) | 190 g (0.42lb) | |
Cache buffer | 128 MB (129,536 KB) |
Seek time
Seek measurements are taken with nominal power at 25°C ambient temperature. All times are measured using drive diagnostics. The specifications in the table below are defined as follows:
- Average seek time is determined by averaging the time to complete 1,000 seeks of random length.
- Average latency is the time required for the drive to rotate 1/2 of a revolution and on average is incurred after a seek completion prior to reading or writing user data.
- Startup time is the time elapsed between the supply voltages reaching operating range and the drive being ready to accept all commands.
- Actual rotational speed can be different a little.
- Performance specification is limited to the room temperature & normal voltage condition.
Table 2: Typical seek times
Typical seek times (ms) | Read/Write |
Average | 14.0/14.0 |
Average latency | 5.6 |
Note: Seek time is defined as the time from the receipt of a read, write or seek comman d until the actuator has repositioned and settled on the desired track with the drive operating at nominal DC input voltages and nominal operating temperature.
Start/stop times
Table 3: Start/stop times
Capacity | 5TB, 4TB and 3TB models |
Typical seek times (ms) | Typical |
Power-on to ready (sec) | 7.5 |
Standby to ready (sec) | 6.5 |
Power Specifications
The drive receives DC power (+5V) through a native SATA power connector (refer to1).
Power consumption
Power requirements for the drives are listed in the table in Table 4. Typical power measurements are based on an average of drives tested, unde r nominal conditions, at 25°C ambient temperature. These power measurements are done with DIPM enabled.
- Spinup current is measured from the time of power-on to the time that the drive spindle reaches operating speed.
- Read/Write current is measured with the heads on track, based on three 64 sector read or write operations every 100 ms.
- The drive supports two idle modes: Active Idle mode and Low Power Idle mode.
Table 4: DC Power Requirements
| Power Dissipation | 5TB, 4TB & 3TB models +5V input average (25° C) |
| Spinup (max) | 1.2A |
| Write average | 2.10W |
| Read average | 1.90W |
| Idle, low power mode | 0.85W |
| Standby1 | 0.18W |
| Sleep | 0.18W |
- Standby power is measured at steady state (after 200ms from transition)
Conducted noise
Input noise ripple is measured at the host system power supply across an equivalent 15-ohm resistive load on the +5 volt line.
- Using 5-volt power, the drive is expected to operate with a maximum of 100 mV peak-to-peak square-wave injected noise at up to 20 MHz.
Note: Equivalent resistance is calculated by dividing the nominal voltage by the typical RMS read/write current.
Supply Voltage
| Allowable voltage | 5V ± 5% |
| Allowable noise/ripple | 100 mV p-p max, 0-30 MHz |
| Allowable supply rise time | 1-100 ms |
| Allowable supply fall time | <5 s |
Power-management modes
The drive provides programmable power management to provide greater energy efficiency. In most systems, users can control power management through the system setup program.
The drive features the following power-management modes:
| Power modes | Heads | Spindle | Electronics |
| Active | Tracking | Rotating | Full Power |
| Idle, Active | Floating | Rotating | Partial Power |
| Idle, Low Power | Parked | Rotating | Partial Power |
| Standby | Parked | Stopped | Low Power |
| Sleep | Parked | Stopped | Low Power |
- Active mode
The drive is in Active mode during the read/write and seek operations. - Idle mode
The electronics remain powered, and the drive accepts all commands and returns to Active mode when disk access is necessary. - Standby mode
The drive enters Standby mode immediately when the host sends a Standby Immediate command. If the host has set the standby timer, the drive enters Standby mode automatically after the drive has been inactive for a specifiable length of time. The standb y timer delay is established using a Standby or Idle command. In Standby mode, the electronics are in low power mode, the heads are parked and the spindle is at rest. The drive accepts all commands and returns to Active mode when disk access is necessary. - Sleep mode
The drive enters Sleep mode after receiving a Sleep command from the host. In Sleep mode, the electronics are in low power mode, the heads are parked and the spindle is at rest. The drive leaves Sleep mode after it receives a Hard Reset or Soft Reset from the host. After receiving a reset, the drive exits Sleep mode and enters Standby mode.
Environmental Specifications
This section provides the temperature, humidity, shock, and vibration specifications for Seagate BarraCuda drives. Ambient temperature is defined as the temperature of the environment immediately surrounding the drive. Above 1000 feet (305 meters), the maximum temperature is derated linearly by 1°C every 1000 feet.
Table 5: Environmental specifications
Parameters | Operating | Non-Operating |
Ambient temperature | 0° to 60°C (32° to 140°F) | -40° to 70°C (-40° to 158°F) |
Temperature gradient | 20°C per hour (68°F per hour) max, without condensation | 35°C per hour (95°F per hour) max, without condensation |
Humidity | 5% to 95% non-condensing (30% per hour) | 5% to 95% non-condensing (30% per hour) |
Wet bulb | 37.7°C (99.8°F) max | 40°C (104°F) max |
Altitude | -304.8m to 3048m (-1000ft to 10,000ft) | -304.8m to 12,192m (-1000ft to 40,000ft) |
Note
The recommended storage period:
- 1 year under controlled conditions of 34°C 90%RH or less
- 90 days in uncontrolled storage conditions
Shock
All shock specifications assume that the drive is mounted securely with the input shock applied at the drive mounting screws. Shock may be applied in the X, Y, or Z axis.
Operating shock
These drives comply with the performance levels specified in this document when subjected to a maximum operating shock of 300 Gs based on half-sine shock pulses of 2 ms. Shocks should not be repeated more than one time per axis. Shocks should not be repeated more than one time per axis. There must be a minimum delay of 3 seconds between pulses.
Non-operating shock
The non-operating shock level that the drive can experience without incurring physical damage or degradation in performance when subsequently put into operation is 650 Gs based on a non-repetitive half-sine shock pulse of 1 ms duration.
Vibration
All vibration specifications assume that the drive is mounted securely with the input vibration applied at the drive mounting screws. Vibration may be applied in the X, Y, or Z axis.
Operating vibration
The maximum vibration levels that the drive may experience while meeting the performance standards specified in this document are specified below.
- 5-500 Hz, Sequential 0.7 Grms
Non-operating vibration
The maximum non-operating vibration levels that the drive may experience without incurring physical damage or degradation in performance when subsequently put into operation are specified below.
- 5-500 Hz, Random 3.52 Grms
Acoustics
Drive emission of sound is measured consistent with the ECMA-74 and its referenced standards. Testing is conducted at room temperatur e (approximately 25°C). Emission levels are reported as the total A-weighted sound power levers for steady state, idle, and active seeks modes of operation.
Table 6: Drive A-weighted Sound Power Levels (SWL, BA)
| Idle1 | Performance Seek |
5TB, 4TB & 3TB models | 2.6 bels (typ) | 2.7 bels (typ) |
- During periods of drive idle, some offline activity may occur according to the S.M.A.R.T. specification, which may increase acoustic and power to operational levels.
Test for prominent discrete tones (PDTs)
Seagate follows the ECMA-74 standards for measurement and identification of PDTs. An exception to this process is the use of the absolut e threshold of hearing. Seagate uses the lower limit for the threshold curve* to discern tone audibility and to compensate for the inaudibl e components of sound prior to computation of tone ratios according to Annex D of the ECMA-74 standards.
- Defined as the median curve given by ISO 389-7 (Tf curve) minus 10dB at all frequencies.
Electromagnetic Immunity
When properly installed in a representative host system, the drive operates without errors or degradation in performance when subjected to the radio frequency (RF) environment as defined in Table 7.
Table 7 Radio Frequency Environments
| Test | Description | Performance Criteria | Reference Standard |
| Electrostatic discharge | Contact, HCP, VCP: ± 4 kV; Air: ± 8 kV | B | EN 61000-4-2: 95 |
| Radiated RF immunity | 80 to 1GHz, 3 V/m, 80% AM with 1 kHz sine 900 MHz, 3 V/m, 50% pulse modulation @ 200 Hz |
A | EN 61000-4-3: 96 ENV 50204: 95 |
| Electrical fast transient | ± 1 kV on AC mains, ± 0.5 kV on external I/O | B | EN 61000-4-4: 95 |
| Surge immunity | ± 1 kV differential, ± 2 kV common, AC mains | B | EN 61000-4-5: 95 |
| Conducted RF immunity | 150 kHz to 80 MHz, 3 Vrms, 80% AM with 1 kHz sine | A | EN 61000-4-6: 97 |
Power Frequency H-field immunity | 1 A/m, 50Hz/60Hz, 3 axes | A | EN 61000-4-8: 97 |
| Voltage dips, interrupts | 30% Reduction for 25 cycles >95% Reduction for 250 cycles >95%, 0.5 cycles | C C B | EN 61000-4-11: 94 |
Reliability
| Nonrecoverable read errors | 1 per 1014 bits read, max |
Load/Unload (U/UL) 25°C, 50% relative humidity |
600,000 software-controlled power on/off cycles 20,000 hard power on/off cycles |
| Rated workload | Average annualized workload rating: <55 TB/year. The AFR specification for the product assumes the I/O workload does not exceed the average annualized workload rate limit of 55 TB/year. Workloads exceeding the annualized rate may degrade the product AFR and impact reliability as experienced by the particular application. The average annualized workload rate limit is in units of TB per calendar year. |
| Warranty | To determine the warranty for a specific drive, use a web browser to access the following web page: http://www.seagate.com/support/warranty-and-replacements/. From this page, click on the “Is my Drive under Warranty” link. The following are required to be provided: the drive serial number, model number (or part number) and country of purchase. The system will display the warranty information for the drive. |
Description
The Seagate Barracuda 2.5 SATA ST5000LM000 is built with reliability and performance in mind. Its 5TB storage capacity allows users to store thousands of hours of video, tens of thousands of photos, and countless documents. The drive's 5400 RPM spindle speed and 128MB cache ensure fast data transfer rates, making it suitable for demanding applications such as video editing and gaming.
The drive's compact 2.5-inch form factor makes it compatible with most laptops and mobile devices, providing an easy upgrade path for those needing additional storage. Seagate's robust design and manufacturing process ensure that the drive can withstand the rigors of daily use.
Unpacking, Configuring, and Mounting the Drive
This chapter describes how to unpack, mount, configure and connect a BarraCuda. It also describes how to install the drive in systems.
Handling and Static-Discharge Precautions
After unpacking, and before installation, the drive may be exposed to potential handling and electrostatic discharge (ESD) hazards. Observe the following standard handling and static-discharge precautions.
CAUTION
- Keep the drive in the electrostatic discharge (ESD) bag until ready for installation to limit the drive’s exposure to ESD.
- Before handling the drive, put on a grounded wrist strap, or ground yourself frequently by touching the metal chassis of a computer that is plugged into a grounded outlet. Wear a grounded wrist strap throughout the entir e installation procedure.
- Handle the drive by its edges or frame only.
- The drive is extremely fragile—handle it with care. Do not press down on the drive top cover.
- Always rest the drive on a padded, antistatic surface until mounting it in the computer.
- Do not touch the connector pins or the printed circuit board.
- Do not remove the factory-installed labels from the drive or cover them with additional labels. Removal voids the warranty. Some factory-installed labels contain information needed to service the drive. Other labels are used to seal out dirt and contamination.
Configuring the Drive
Each drive on the Serial ATA interface connects in a point-to-point configuration with the Serial ATA host adapter. There is no master/slave relationship because each drive is considered a master in a point-to-point relationships. If two drives are attached on one Serial ATA host adapter, the host operating system views the two devices as if they were both “masters” on two separate ports. Both drives behave as if they are Device 0 (master) devices.
Serial ATA Cables and Connectors
The Serial ATA interface cable consists of four conductors in two differential pairs, plus three ground connections. The cable size may be 30 to 2 6 AWG with a maximum length of one meter (39.37 in). Refer to Table 9 for connector pin definitions. Either end of the SATA signal cable can be attached to the drive or host.
For direct backplane connection, the drive connectors are inserted directly into the host receptacle. The drive and the host receptacle incorporate features that enable the direct connection to be hot pluggable and blind mateable. For installations which require cables, users can connect the drive as shown in1.
Figure 1 Attaching SATA Cabling
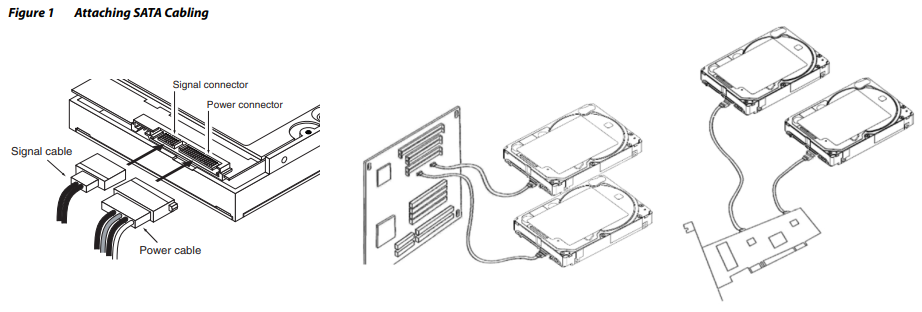
Each cable is keyed to ensure correct orientation. BarraCuda drives support latching SATA connectors.
Drive Mounting
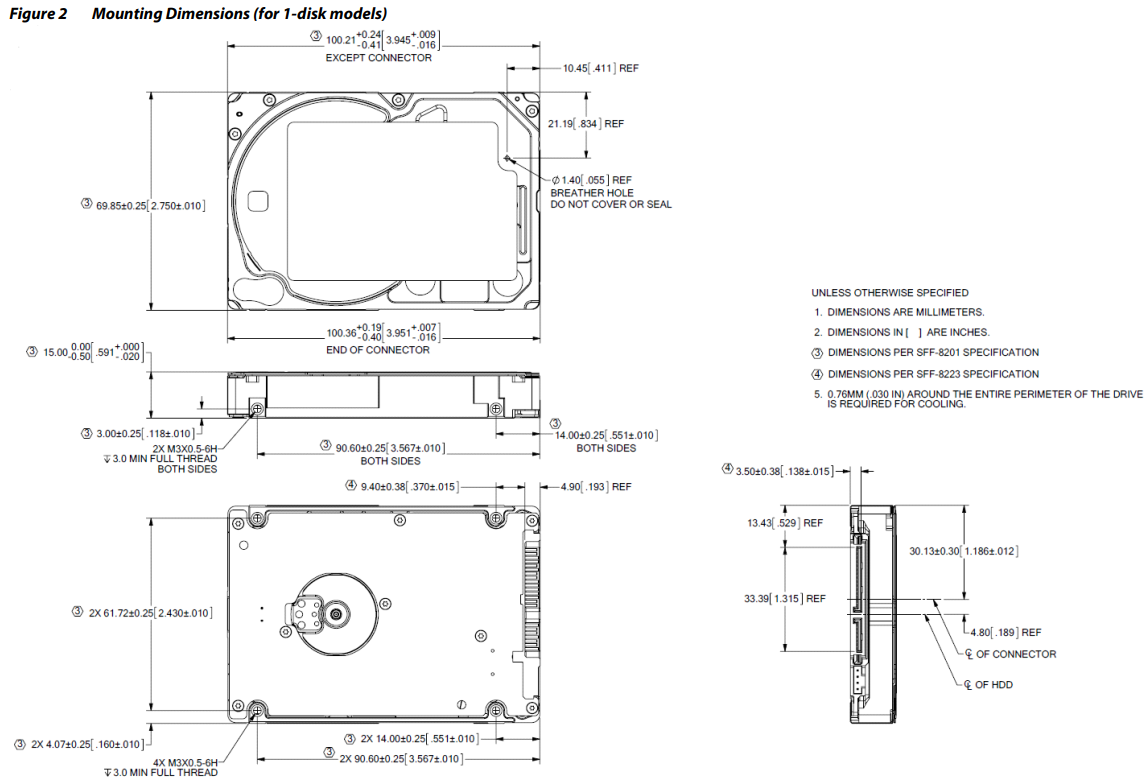
Users can mount the drive in any orientation using four screws in the side-mounting holes or four screws in the bottom-mounting holes. Refer to2 and Figure 2 for drive mounting dimensions. Follow these important mounting precautions when mounting the drive:
- Allow a minimum clearance of 0.030 in (0.76 mm) around the entire perimeter of the drive for cooling.
- Use only M3 x 0.5 mounting screws.
- Do not overtighten the mounting screws. Maximum torque: 4.0 in-lb (0.4519 N-m).
- Four (4) threads (0.080 in, 2.032 mm) minimum screw engagement recommended.
- Avoid excessive drive distortion when mounting. Refer to the following specifications for stiffness/deflection information:
Top cover stiffness/deflection |
|
Operating: no performance degradation, emitted noise, mechanical damage, or hard errors | 10 mm probe: 2.0kgf (typical) |
| Non-operating: no hard errors | 10 mm probe: maximum 2.0kgf (instantaneous) |
Figure 2 Mounting Dimensions (for 1-disk models)
Serial ATA (SATA) Interface
These drives use the industry-standard Serial ATA interface that supports FIS data transfers. It supports ATA programmed input/output (PIO) mode s 0–4; multiword DMA modes 0–2, and Ultra DMA modes 0–6. The drive also supports the use of the IORDY signal to provide reliable high-speed data transfers.
Hot-Plug Compatibility
BarraCuda drives incorporate connectors which enable users to hot plug these drives in accordance with the Serial ATA: High Speed Serialized A T Attachment specification revision 2.0. This specification can be downloaded from https://www.serialata.org This device requires a COMRESET from th e host after a hotplug event.
Serial ATA Device Plug Connector Pin Definitions
Table 9 summarizes the signals on the Serial ATA interface and power connectors. Refer to the Table Notes below.
Table 9 Serial ATA Connector Pin Definitions
| Segment | Pin | Function | Definition |
Signal | S1 | Ground | 2nd mate |
| S2 | A+ | Differential signal pair A from Phy | |
| S3 | A- | ||
| S4 | Ground | 2nd mate | |
| S5 | B- | Differential signal pair B from Phy | |
| S6 | B+ | ||
| S7 | Ground | 2nd mate | |
| Key and spacing separate signal and power segments | |||
Power | P1 | V33 | 3.3V power |
| P2 | V33 | 3.3V power | |
| P3 | V33 | 3.3V power, pre-charge, 2nd mate | |
| P4 | Ground | 1st mate | |
| P5 | Ground | 2nd mate | |
| P6 | Ground | 2nd mate | |
| P7 | V5 | 5V power, pre-charge, 2nd mate | |
| P8 | V5 | 5V power | |
| P9 | V5 | 5V power | |
| P10 | Ground | 2nd mate | |
| P11 | Ground or LED signal | If grounded, drive does not use deferred spin | |
| P12 | Ground | 1st mate | |
| P13 | V12 | 12V power, pre-charge, 2nd mate | |
| P14 | V12 | 12V power | |
| P15 | V12 | 12V power | |
Notes
- All pins are in a single row, with a 1.27 mm (0.050 in) pitch.
- The comments on the mating sequence apply to the case of backplane blindmate connector only. In this case, the mating sequences are:
- the ground pins P4 and P12.
- the pre-charge power pins and the other ground pins.
- the signal pins and the rest of the power pins.
- There are three power pins for each voltage. One pin from each voltage is used for pre-charge when installed in a blind-mate backplane configuration.
- All used voltage pins (Vx) must be terminated.
Supported ATA Commands
Table 10 lists Serial ATA standard commands that the drive supports. For a detailed description of the ATA commands, refer to the Serial AT A International Organization: Serial ATA (Revision 2.6). Refer to https://www.sata-io.org
Refer to S.M.A.R.T. commands on page 28 for details and subcommands used in the S.M.A.R.T. implementation.
Table 10 Supported ATA commands
ATA-standard commands names | Command code (in hex) |
| Device Configuration Restore | B1h/C0h |
| Device Configuration Freeze Lock | B1h/C1h |
| Device Configuration Identify | B1h/C2h |
| Device Configuration Set | B1h/C3h |
| Download Microcode | 92h |
| Execute Device Diagnostics | 90h |
| Flush Cache | E7h |
| Flush Cache Extended | EAh |
| Identify Device | ECh |
| Initialize Device Parameters | 91h |
| Read Buffer | E4h |
| Read DMA | C8h |
| Read DMA Extended | 25h |
| Read DMA without Retries | C9h |
| Read Long with Retries | 22h |
| Read Long without Retries | 23h |
| Read Multiple | C4h |
| Read Multiple Extended | 29h |
| Read Native Max Address | F8h |
| Read Native Max Address Extended | 27h |
| Read Sectors | 20h |
| Read Sectors Extended | 24h |
| Read Sectors without Retries | 21h |
| Read Verify Sectors | 40h |
ATA-standard commands names | Command code (in hex) | ||
| Read Verify Sectors Extended | 42h | ||
| Read Verify Sectors without Retries | 41h | ||
| Seek | 70h | ||
| Set Features | EFh | ||
| Set Max Address | F9h | ||
| Note: Individual Set Max commands are identified by the value | Address: | 00H | |
| placed in the Set Max Features register as defined to the right. | Password: Lock: | ||
01H 02H | |||
Unlock: | |||
| 03H | ||
Freeze Lock: | |||
| 04H | ||
| Set Max Address Ext | 37h | ||
| Set Multiple Mode | C6h | ||
| S.M.A.R.T. Disable Operations | B0h/D9h | ||
| S.M.A.R.T. Enable/Disable Autosave | B0h/D2h | ||
| S.M.A.R.T. Enable Operations | B0h/D8h | ||
| S.M.A.R.T. Enable/Disable Auto Offline | B0h/DBh | ||
| S.M.A.R.T. Enable One Attribute Modification | B0h/E0h | ||
| S.M.A.R.T. Execute Offline | B0h/D4h | ||
| S.M.A.R.T. Free Fall Protection Host Interface | FEh | ||
| S.M.A.R.T. Read Attribute Thresholds | B0h/D1h | ||
| S.M.A.R.T. Read Data | B0h/D0h | ||
| S.M.A.R.T. Read Log Sector | B0h/D5h | ||
| S.M.A.R.T. Return Status | B0h/DAh | ||
| S.M.A.R.T. Save Attribute Values | B0h/D3h | ||
| S.M.A.R.T. Write Attribute Thresholds | B0h/D7h | ||
| S.M.A.R.T. Write Attribute Values | B0h/E1h | ||
| S.M.A.R.T. Write Log Sector | B0h/D6h | ||
| Trusted Receive | 5Ch | (SED only) | |
| Trusted Receive DMA | 5Dh | (SED only) | |
| Trusted Send | 5Eh | (SED only) | |
| Trusted Send DMA | 5Fh | (SED only) | |
| Write Buffer | E8h | ||
| Write DMA | CAh | ||
| Write DMA Extended | 35h | ||
| Write DMA without Retries | CBh | ||
| Write Long with Retries | 32h | ||
ATA-standard commands names | Command code (in hex) |
| Write Long without Retries | 33h |
| Write Multiple | C5h |
| Write Multiple Extended | 39h |
| Write Sectors | 30h, 31h |
| Write Sectors Extended | 34h |
ATA-standard power-management commands | |
| Check Power Mode | E5h |
| Idle | E3h |
| Idle Immediate | E1h |
| Sleep | E6h |
| Standby | E2h |
| Standby Immediate | E0h |
ATA-standard security commands | |
| Security Set Password | F1h |
| Security Unlock | F2h |
| Security Erase Prepare | F3h |
| Security Erase Unit | F4h |
| Security Freeze Lock | F5h |
| Security Disable Password | F6h |
Identify Device command
The Identify Device command (command code ECH) transfers information about the drive to the host following power up. The data is organized as a single 512-byte block of data, whose contents are shown in Table 11. All reserved bits or words should be set to zero. Parameters listed with an “x ” are drive-specific or vary with the state of the drive. Refer to Drive Specifications Summary on page 6 for default parameter settings.
The following commands contain drive-specific features that may not be included in the Serial ATA specification.
Table 11 Identify Device command
| Word | Description | Value |
0 | Configuration information:
| 0C5AH |
| 1 | Number of logical cylinders | 16,383 |
| 2 | Specific configuration | C837H |
| 3 | Number of logical heads | 16 |
| 4 | Retired | 0000H |
| 5 | Retired | 0000H |
| 6 | Number of logical sectors per logical track: 63 | 003FH |
| 7–9 | Retired | 0000H |
| 10–19 | Serial number: (20 ASCII characters, 0000H = none) | ASCII |
| 20 | Retired | 0000H |
| 21 | Retired | 8000H |
| 22 | Obsolete | 0004H |
| 23–26 | Firmware revision: (8 ASCII character string, padded with blanks to end of string) | x.xx |
| 27–46 | Drive model number: (40 ASCII characters, padded with blanks to end of string) | ST5000LM000 ST4000LM024 ST3000LM024 |
| 47 | (Bits 7–0) Maximum sectors per interrupt on Read multiple and Write multiple (16) | 8010H |
| 48 | Trusted Computing Feature set options | 4001H |
| 49 | Standard Standby timer, IORDY supported and may be disabled | 2F00H |
| 50 | Capabilities | 4000H |
| 51 | PIO data-transfer cycle timing mode | 0200H |
| 52 | Retired | 0200H |
| 53 | Words 54–58, 64–70 and 88 are valid | 0007H |
| 54 | Number of current logical cylinders | xxxxH |
| 55 | Number of current logical heads | xxxxH |
| 56 | Number of current logical sectors per logical track | xxxxH |
| 57–58 | Current capacity in sectors | xxxxH |
| 59 | Number of sectors transferred during a Read Multiple or Write Multiple command | xxxxH |
| 60–61 | Total number of user-addressable sectors This field contains a value that is one greater than the total number of user-addressable sectors. Themaximum value that shall be placed in this fieldis 0FFFFFFFh. The 0FFFFFFFh value applies to all capacities over 137GB (see Section 2.2, Formatted Capacity for related information). | ST5000LM000 = 0FFFFFFFh ST4000LM024 = 0FFFFFFFh ST3000LM024 = 0FFFFFFFh |
| 62 | Retired | 0000H |
| 63 | Multiword DMA activeand modes supported (see note following this table) | xx07H |
| 64 | Advanced PIO modes supported (modes 3 and 4 supported) | 0003H |
| 65 | Minimum multiword DMA transfer cycle time per word (120 ns) | 0078H |
| 66 | Recommended multiword DMA transfer cycle time per word (120 ns) | 0078H |
| 67 | Minimum PIO cycle time without IORDY flow control (240 ns) | 0078H |
| 68 | Minimum PIO cycle time with IORDY flow control (120 ns) | 0078H |
| 69 | Additional Supported bits Bit 4 means Device Encrypts All User Data on the device. Bit 7 means IEEE1667 protocol is supported. | xx1xH or xx9xH |
| 70–74 | ATA-reserved | 0000H |
| 75 | Queue depth | 001FH |
| 76 | Serial ATA capabilities | 0D06H |
| 77 | ATA-reserved | 0000H |
| 78 | Serial ATA features supported | 0048H |
| 79 | Serial ATA features enabled | 0048H |
| 80 | Major version number | 01F0H |
| 81 | Minor version number | 0029H |
| 82 | Command sets supported | 746BH |
| 83 | Command sets supported | 7D69H |
| 84 | Command sets support extension | 61E3H |
| 85 | Command sets enabled | 7469 |
| 86 | Command sets enabled | BC49H |
| 87 | Command sets enable extension | 61E3H |
| 88 | Ultra DMA support and current mode (see note following this table) | xx7FH |
| 89 | Security erase time | xxxxH |
| 90 | Enhanced security erase time | xxxxH |
| 91 | Current APM values | 8080H |
| 92 | Master password revision code | FFFEH |
| 93 | Hardware reset value (see description following this table) | xxxxH |
| 94 | Auto acoustic management setting | xxxxH |
| 95 | Stream Min. Request Size | 0000H |
| 96 | Streaming Transfer Time - DMA | 0000H |
| 97 | Streaming Access Latency - DMA and PIO | 0000H |
| 98-99 | Streaming Performance Granularity | 0000H |
| 100–103 | Total number of user-addressable LBA sectors available (see Section 3.2, Configuring the Drive for related information) These words are required for drives that support the 48-bit addressing feature. Maximum value: 0000FFFFFFFFFFFFh. | ST5000LM000 = 9,767,541,168 ST4000LM024 = 3,907,029,168 ST3000LM024 = 1,953,525,168 |
| 104 | Streaming Transfer Time - PIO | 0000H |
| 105 | Reserved | 0000H |
| 106 | Physical sector size / Logical sector size | 6003H |
| 107 | Seagate reserved | 0000H |
| 108-111 | The mandatory value of the world wide name (WWN) for the drive. NOTE: This field is valid if word 84, bit 8 is set to 1 indicating 64-bit WWN support. | Each drive will have a unique value. |
| 112-118 | ATA-reserved | 0000H |
| 119 | Free Fall Protection support (bit 5) | 1 = Free Fall Protection supported 0 = Free Fall Protection not supported |
| 120 | Free Fall Protection enable/disable (bit 5) | 1 = Free Fall Protection feature is enabled 0 = Free Fall Protection feature is disabled |
| 121–127 | ATA-reserved | 0000H |
| 128 | Security status | 0021H |
| 129–159 | Seagate-reserved | xxxxH |
| 160–221 | ATA-reserved | 0000H |
| 222 | Transport major version number | 101FH |
| 223–254 | ATA-reserved | 0000H |
| 255 | Integrity word | xxA5H |
Table 12 Bit Descriptions
| Description (if bit is set to 1) | |
| Bit | Word 63 |
| 0 | Multiword DMA mode 0 is supported. |
| 1 | Multiword DMA mode 1 is supported. |
| 2 | Multiword DMA mode 2 is supported. |
| 8 | Multiword DMA mode 0 is currently active. |
| 9 | Multiword DMA mode 1 is currently active. |
| 10 | Multiword DMA mode 2 is currently active. |
| Bit | Word 88 |
| 0 | Ultra DMA mode 0 is supported. |
| 1 | Ultra DMA mode 1 is supported. |
| 2 | Ultra DMA mode 2 is supported. |
| 3 | Ultra DMA mode 3 is supported. |
| 4 | Ultra DMA mode 4 is supported. |
| 5 | Ultra DMA mode 5 is supported. |
| 6 | Ultra DMA mode 6 is supported. |
| 8 | Ultra DMA mode 0 is currently active. |
| 9 | Ultra DMA mode 1 is currently active. |
| 10 | Ultra DMA mode 2 is currently active. |
| 11 | Ultra DMA mode 3 is currently active. |
| 12 | Ultra DMA mode 4 is currently active. |
| 13 | Ultra DMA mode 5 is currently active. |
| 14 | Ultra DMA mode 6 is currently active. |
| Bit | Word 93 |
| 13 | 1 = 80-conductor cable detected, CBLID above VIH 0= 40-conductor cabledetected, CBLID belowVIL |
Set Features command
This command controls the implementation of various features that the drive supports. When the drive receives this command, it sets BSY, check s the contents of the Features register, clears BSY and generates an interrupt. If the value in the register does not represent a feature that the drive supports, the command is aborted. Power-on default has the read look-ahead and write caching features enabled.
The acceptable values for the Features register are defined as follows:
Table 13 Set Features command values
| 02H | Enable write cache (default). |
| 03H | Set transfer mode (based on value in Sector Countregister). Sector Count register values: 00H Set PIO mode to default (PIO mode 2). 01H Set PIO mode to default and disable IORDY (PIO mode 2). 08H PIO mode 0 09H PIO mode 1 0AH PIO mode 2 0BH PIO mode 3 0CH PIO mode 4 (default) 20H Multiword DMA mode 0 21H Multiword DMA mode 1 22H Multiword DMA mode 2 40H Ultra DMA mode 0 41H Ultra DMA mode 1 42H Ultra DMA mode 2 43H Ultra DMA mode 3 44H Ultra DMA mode 4 45H Ultra DMA mode 5 46H Ultra DMA mode 6 |
| 55H | Disable read look-ahead (read cache) feature. |
| 82H | Disable write cache |
| AAH | Enable read look-ahead (read cache) feature (default). |
| C1H | Disable the Free Fall Protection feature (41H above enables the Free Fall Protection feature) |
| F1H | Report full capacity available |
Note: At power-on, or after a hardware or software reset, the default values of the features are as indicated above
S.M.A.R.T. commands
S.M.A.R.T. provides near-term failure prediction for disk drives. When S.M.A.R.T. is enabled, the drive monitors predetermined drive attributes that are susceptible to degradation over time. If self-monitoring determines that a failure is likely, S.M.A.R.T. makes a status report available to the host. Not all failures are predictable. S.M.A.R.T. predictability is limited to the attributes the drive can monitor. For more information on S.M.A.R.T. commands and implementation, see the Draft ATA-5 Standard.
SeaTools diagnostic software activates a built-in drive self-test (DST S.M.A.R.T. command for D4H) that eliminates unnecessary drive returns. The diagnostic software ships with all new drives and is also available at: http://www.seagate.com/support/downloads/seatools/
This drive is shipped with S.M.A.R.T. features disabled. Users must have a recent BIOS or software package that supports S.M.A.R.T. to enable this feature. The table below shows the S.M.A.R.T. command codes that the drive uses.
Table 14 S.M.A.R.T. Commands
Code in features register | S.M.A.R.T. command |
D0H | S.M.A.R.T. Read Data |
D2H | S.M.A.R.T. Enable/Disable Attribute Autosave |
D3H | S.M.A.R.T. Save Attribute Values |
D4H | S.M.A.R.T. Execute Off-line Immediate (runs DST) |
D5H | S.M.A.R.T. Read Log Sector |
D6H | S.M.A.R.T. Write Log Sector |
D8H | S.M.A.R.T. Enable Operations |
D9H | S.M.A.R.T. Disable Operations |
DAH | S.M.A.R.T. Return Status |
Note: If an appropriate code is not written to the Features Register, the command is aborted and 0x 04 (abort) is written to the Error register.
Setup Guide
To set up the Seagate Barracuda 2.5 SATA ST5000LM000, follow these steps:
- Shut down your laptop or device completely.
- Locate the hard drive bay in your device. This is usually accessible from the bottom or side.
- Remove any screws holding the bay cover in place and carefully pull out the existing drive (if applicable).
- Connect the new drive to the SATA port on your motherboard, ensuring it is securely seated.
- Replace any screws you removed to secure the drive in place.
- Boot up your device and enter the BIOS settings (usually by pressing F2, F12, or Del during startup).
- Recognize the new drive in the BIOS settings and save the changes.
- Install an operating system if necessary or format the drive through your operating system's disk management tools.
Troubleshooting
If you encounter issues with your Seagate Barracuda 2.5 SATA ST5000LM000, here are some common problems and solutions:
- Drive Not Recognized: Ensure the drive is properly connected to the SATA port and recognized by the BIOS. Check for loose connections.
- Slow Performance: Check for disk fragmentation and run a disk defragmentation tool if necessary. Also, ensure that no other resource-intensive processes are running in the background.
- Data Loss: Regularly back up your data to prevent loss. Use a reliable backup solution like an external hard drive or cloud storage.
- Overheating: Ensure good airflow around your device to prevent overheating. Avoid placing the device on soft surfaces that may block air vents.
Seagate Barracuda 2.5 SATA ST5000LM000 Pros & Cons
Pros
- High Storage Capacity: Offers 5TB of storage, ideal for large data sets.
- Compact Design: The 2.5-inch form factor makes it compatible with most laptops.
- Reliable Performance: 5400 RPM spindle speed and 128MB cache ensure smooth data access.
- Energy Efficiency: Low power consumption helps extend battery life in mobile devices.
Cons
- Speed Limitations: While adequate for most users, faster SSDs may outperform this HDD in certain tasks.
- Physical Sensitivity: As with all mechanical drives, it can be sensitive to physical shocks and drops.
- Noise Level: May produce more noise compared to solid-state drives due to its mechanical nature.
Customer Reviews
Customer reviews for the Seagate Barracuda 2.5 SATA ST5000LM000 have been generally positive, with many users praising its high storage capacity and reliable performance. However, some users have noted that it may not be as fast as solid-state drives and can be noisy during operation.
Common Complaints:
- Some users have reported issues with compatibility in certain laptop models.
- A few users have experienced slower write speeds compared to other hard drives.
Faqs
What is the storage capacity of the Seagate Barracuda 2.5 SATA?
What is the spindle speed of this hard drive?
Is this hard drive compatible with all laptops?
How do I set up this hard drive in my laptop?
Can I use this hard drive for gaming?
Why is my Seagate Barracuda 2.5 SATA ST5000LM000 not recognized by my laptop?
How does this hard drive handle overheating?
Can I upgrade my current laptop hard drive with this one?
Is this hard drive energy-efficient?
What are some common issues with this hard drive?
Leave a Comment