Dji Educational Robort Robomaster S1 User Manual | Operations

Content
Introduction
The Dji Educational Robort Robomaster S1 is an educational robot inspired by the DJITM RoboMaster competition. The S1 offers comprehensive control and an immersive driving experience thanks to the omnidirectional chassis, agile Mecanum wheels, flexible gimbal, and stable, low-latency image transmission in first person view (FPV). Users can also target objects and battle other robots with the blaster.
The body of the S1 is covered in armor, and each piece has a hit detection module that can instantly detect physical hits and feed back to the intelligent controller. The blaster provides high-level accuracy and stability thanks to the 2-axis gimbal while the launch trajectory light gives users a realistic and immersive experience. The intelligent controller is integrated with multiple systems including a video transmission system, game system, and Scratch programming system. It includes six smart modules, including line recognition, vision marker recognition, person recognition, clapping recognition, gesture recognition, and S1 robot recognition. The S1 supports Scratch and Python programming. With DJI’s project-based tutorials, users can gradually master programming theory and robotics knowledge.
The S1 also features Solo mode and Battle mode, where users can practice their skills and compete against others. To control the S1, the RoboMaster app can be used on a mobile device, the gamepad, or with a keyboard and mouse. The DJI RoboMaster S1 costs $549.99, making it an accessible option for aspiring roboticists and programmers.
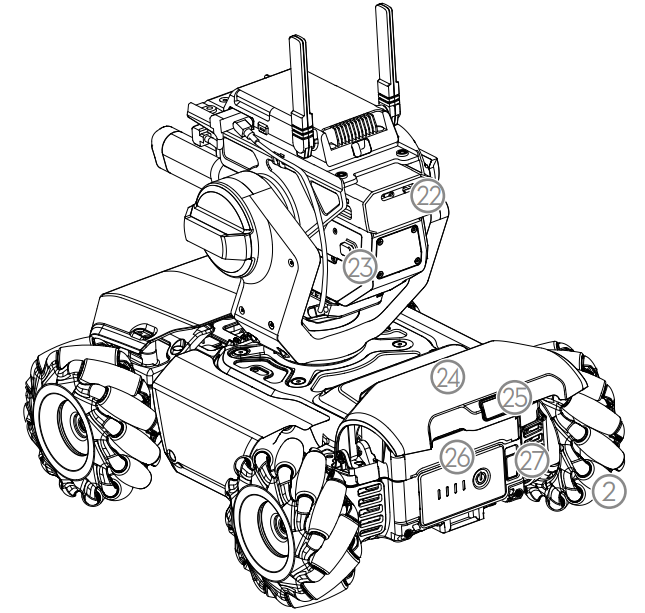
S1 Diagram
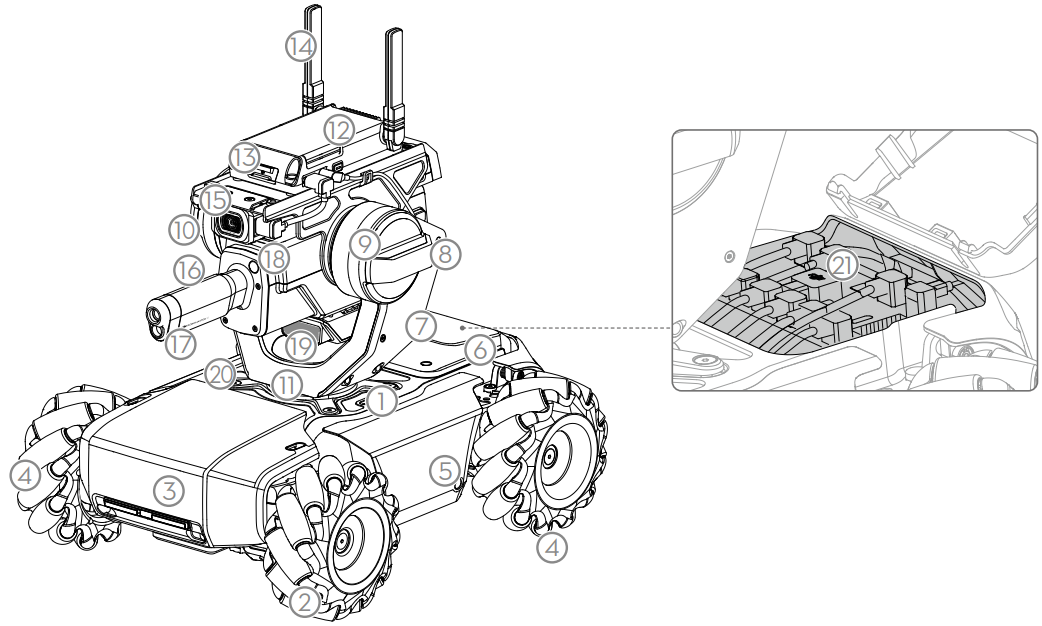
- Chassis
- Right-Threaded Mecanum Wheel
- Chassis Front Armor (built-in Hit Detector)
- Left-Threaded Mecanum
- Wheel Chassis Left Armor (built-in Hit Detector)
- Chassis Rear Cover
- Gimbal
- Wide Infrared Unit
- Gimbal Armor (built-in Hit Detector)
- Pitch Motor
- Yaw Motor
- Intelligent Controller
- microSD Slot
- Intelligent Controller Antenna
- Camera
- Blaster
- Launch Trajectory Light
- Narrow Infrared Unit
- Speaker
- Chassis Right Armor (built-in Hit Detector)
- Chassis Motion Controller
- Gel Bead Container
- Container Eject Button
- Chassis Rear Armor (built-in Hit Detector)
- Rear Armor Release Button
- Intelligent Battery
- Battery Eject Button
Dji Educational Robort Robomaster S1 Specifications
RoboMaster S1
- Dimensions (L×W×H): 320×240×270 mm
- Weight: Approx. 3.3 kg
- Chassis Speed Range:
- 0-3.5 m/s (forward)
- 0-2.5 m/s (backward)
- 0-2.8 m/s (sideward)
- Max Chassis Rotational Speed: 600°/s
M3508I Brushless Motor
- Max Rotational Speed: 1000 rpm
- Max Torque: 0.25 N·m
- Max Output Power: 19 W
- Operating Temperature Range: -10 to 40 °C (14 to 104 °F)
- Driver: Field-oriented control (FOC)
- Control Method: Closed-loop speed control
- Protection
- Overvoltage protection
- Overheating protection
- Soft-starter
- Short-circuit protection
- Chip and sensor anomaly detection
Gimbal
- Controllable Range: -20° to +35° (pitch); ±250° (yaw)
- Mechanical Range: -24° to +41° (pitch); ±270° (yaw)
- Max Rotational Speed: 540°/s
- Vibration Control Precision (on a flat surface, blaster idle): ±0.02°
Blaster
- Controllable Launching Frequency: 1-8/s
- Max Launching Frequency: 10/s
- Initial Launching Speed: Approx. 26 m/s
- Average Load: Approx. 430 gel beads (soaked)
Intelligent Controller
- Latency[1]
- Connection via Wi-Fi: 80-100 ms
- Connection via Router: 100-120 ms (unobstructed, free of interference)
- Live View Quality: 720p/30fps
- Max Live View Bitrate: 6 Mbps
- Operating Frequency[2]: 2.4 GHz, 5.1 GHz, 5.8 GHz
Transmission Power (EIRP)
- 2.400-2.4835 GHz
- FCC: ≤30 dBm
- SRRC: ≤20 dBm
- CE: ≤19 dBm
- MIC: ≤20 dBm
- 5.150-5.250 GHz
- FCC: ≤30 dBm
- SRRC: ≤23 dBm
- CE: ≤20 dBm
- MIC: ≤23 dBm
- 5.725-5.850 GHz
- FCC: ≤30 dBm
- SRRC: ≤30 dBm
- CE: ≤14 dBm
- Operating Mode: Connection via Wi-Fi, Connection via Router
Max Transmission Distance
- Connection via Wi-Fi:
- FCC, 2.4 GHz: 140 m, 5.8 GHz: 90 m
- CE, 2.4 GHz: 130 m, 5.8 GHz: 70 m
- SRRC, 2.4 GHz: 130 m, 5.8 GHz: 130 m
- MIC, 2.4 GHz: 130 m
- Connection via Router:
- FCC, 2.4 GHz: 190 m, 5.8 GHz: 300 m
- CE, 2.4 GHz: 180 m, 5.1 GHz: 70 m
- SRRC, 2.4 GHz: 180 m, 5.8 GHz: 300 m
- MIC, 2.4 GHz: 180 m
- Transmission Standard: IEEE802.11a/b/g/n
Camera
- Sensor: CMOS 1/4″;
- Effective pixels: 5MP
- FOV: 120°
- Max Still Photo Resolution: 2560×1440 pixels
- Max Video Resolution:
- FHD: 1080p/30fps
- HD: 720p/30fps
- Max Video Bitrate: 16 Mbps
- Photo Format: JPEG
- Video Format: MP4
- Supported SD Cards: Supports microSD cards with a capacity of up to 64 GB
- Operating Temperature Range: -10 to 40 °C (14 to 104 °F)
Narrow Infrared Units
- Effective Range[4]: 6 m (in indoor lighting conditions)
- Effective Area: Varies from 40° to 10° (effective area decreases as the distance from the target increases)
Wide Infrared Units
- Effective Range[4]: 3 m (in indoor lighting conditions)
- Effective Width: 360° (in indoor lighting conditions)
Hit Detector
- Detection Requirements: For the hit detector to be activated, the following conditions must be met: Gel bead diameter ≥ 6mm, launching speed ≥20 m/s, and the angle between the hit direction and hit detector plane is no less than 45°.
- Maximum Detection Frequency:15 Hz
Intelligent Battery
- Capacity: 2400 mAh
- Maximum Charging Voltage: 12.6 V
- Nominal Charging Voltage: 10.8 V
- Battery Type: LiPo 3S
- Energy: 25.92 Wh
- Battery Life (in use): 35 mins (measured at a constant speed of 2.0 m/s on a flat surface)
- Battery Life (on standby): Approx. 100 mins
- Weight: 169 g
- Operating Temperature Range: -10 to 40 °C (14 to 104 °F)
- Charging Temperature Range: 5 to 40 °C (41 to 104 °F)
- Maximum Charging Power: 29 W
Charger
- Input: 100-240 V, 50-60 Hz, 1 A
- Output Port: 12.6 V=0.8 A or 12.6 V=2.2 A
- Voltage: 12.6 V
- Rated Voltage: 28 W
Gel Bead
- Diameter: 5.9-6.8 mm[5]
- Weight: 0.12-0.17 g[5]
App
- iOS: iOS 10.0.2 or later
- Android: Android 5.0 or later
Others
- Recommended Routers: TP-Link TL-WDR8600; TP-Link TL-WDR5640 (China) TP-Link Archer C7; NETGEAR X6S (International)
- Recommended outdoor power supply solution for routers: Portable laptop charger (with the same input power of the router)
Preparing
Assembling the S1
Refer to the RoboMaster S1 Quick Start Guide.
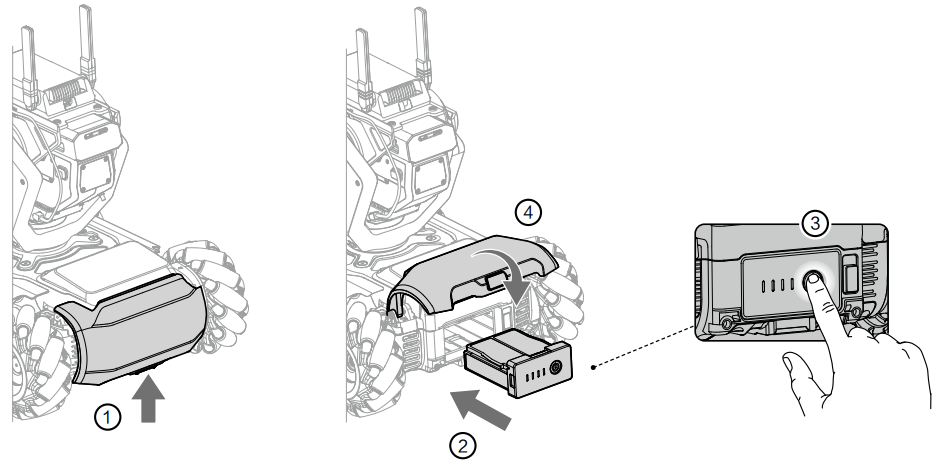
Powering On the S1
Follow the steps below to power on the S1:
- Press the rear armor release button to open the chassis rear armor.
- Install the intelligent battery into the battery compartment.
- Press and hold the power button to turn on the battery.
- Close the chassis rear armor.
Downloading the RoboMaster App
- A. Search for the RoboMaster app in the App Store or on Google Play or scan the QR code to download the app on your mobile device.
- B. Users can also download the RoboMaster software for Windows or Mac from the official DJI website to control the S1 with a keyboard and mouse.
Windows: https://www.dji.com/robomaster_app
Mac: https://www.dji.com/robomaster_app
- Use your Dul account to log in to the RoboMaster app.
- The RoboMaster app supports iOS 10.0.2 or later or Android 5.0 or later.
- The RoboMaster app supports Windows 7 or later or MacOS 10.13 or later.
- Before using the RoboMaster app with cellular mobile data, contact your mobile device data provider for the latest data information.
Connecting the S1 and the App
The S1 must be connected to the RoboMaster app in order to use. Users can learn how to connect via Wi-Fi or via a router in the Connection Mode page. Follow the prompts to connect the S1 to the app. Refer to the Connecting section for more information.

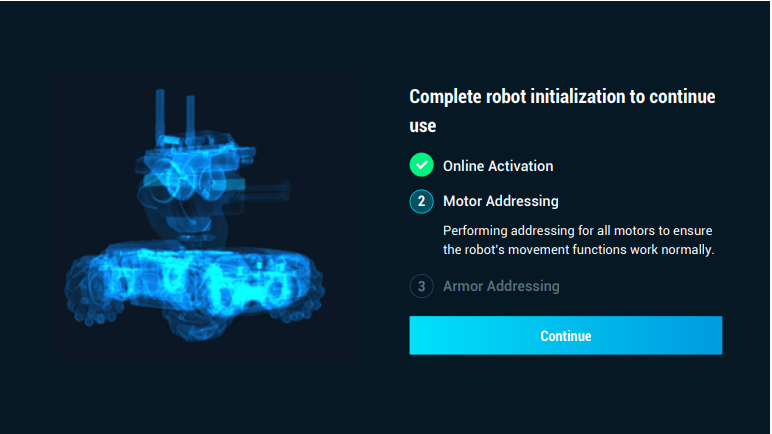
Initializing the S1 with the App
Activating the S1
After connecting, use your DJI account to activate the S1 in the RoboMaster app. Activation requires an internet connection.
Start activation.
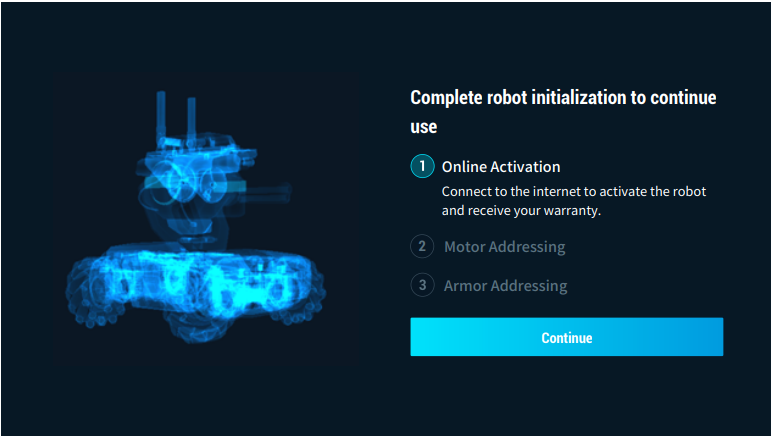
Follow the prompts to complete activation.

Motor Addressing
Motor addressing is required in the app before using for the first time. Follow the prompts to complete motor addressing.
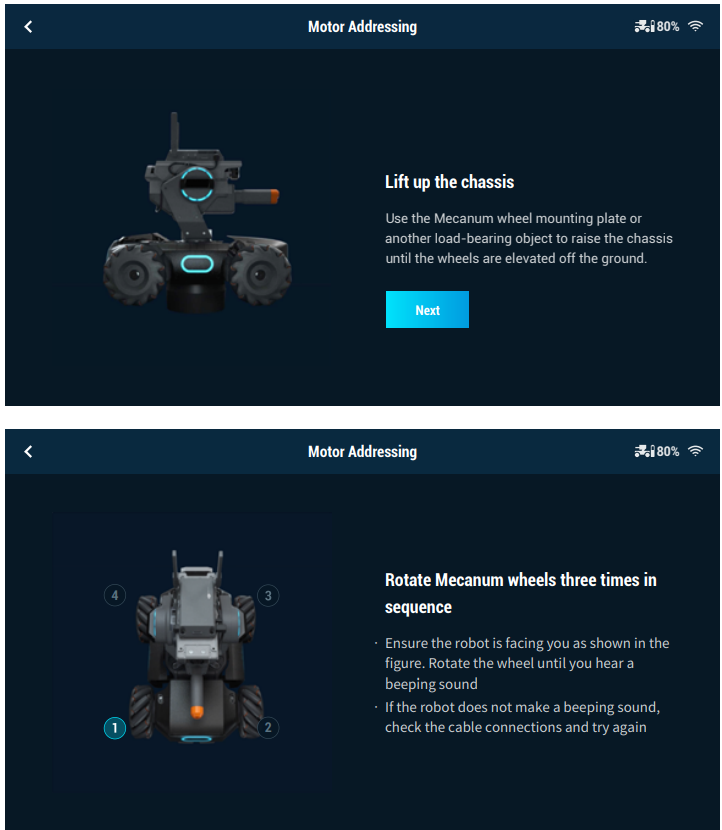
Start Motor Addressing.
Lift the chassis and follow the prompts to rotate the Mecanum wheels in the order shown onscreen until all wheels have been rotated.
Tap
 to test the Mecanum wheels one by one until all wheels have been tested.
to test the Mecanum wheels one by one until all wheels have been tested.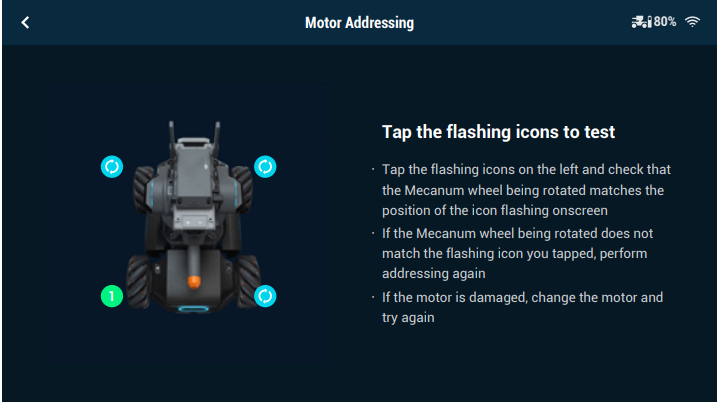
Motor addressing completed.
NOTE: Motor addressing is required when a motor is replaced. Open the RoboMaster app, click Settings then System, and select Motor Addressing.
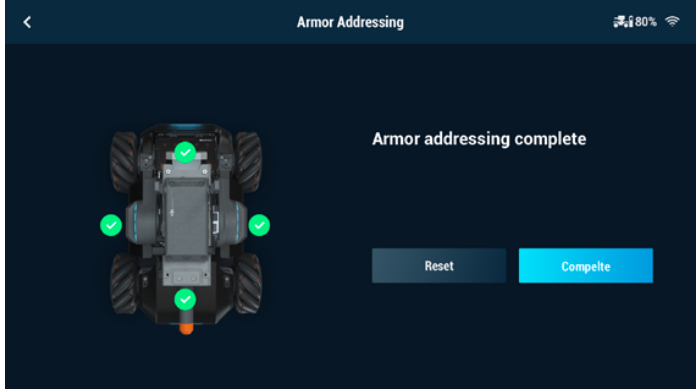
Armor Addressing
Armor addressing is required in the app when using the S1 for the first time. Follow the prompts to complete armor addressing.
- Start Armor Addressing.
- Follow the prompts to tap on the armor plates in the order shown onscreen.
- Armor addressing completed.
NOTE: Armor addressing is required when an armor module is replaced. Go to the RoboMaster app, click Settings, then System, and select Armor Addressing.
Description
The DJI RoboMaster S1 is a robust and versatile educational robot that offers a unique learning experience. Its modular design allows users to customize the robot's components, such as adding different types of sensors or changing the structure of the robot. The computer vision system enables the robot to detect and recognize objects, track targets, and perform tasks with precision. The robot also features a comprehensive SDK that supports popular programming languages like Python and visual programming tools like Scratch 3.0.
The sensor array includes infrared sensors for obstacle avoidance, ultrasonic sensors for distance measurement, and a gyroscope for balance control. These features make it ideal for teaching concepts related to autonomous navigation, machine learning, and robotics engineering.
Operating Your Dji Educational Robort Robomaster S1
Checking Before Use
Check the following each time you use the S1:
- Make sure the motion controller is properly installed, all cables are connected, and the screws on the chassis rear cover are tightened.
- Make sure the intelligent controller, blaster, camera, and speaker are connected.
- Make sure the microSD card is inserted.
- Make sure the intelligent battery is fully charged and properly inserted.
- For optimal Wi-Fi connection, set the intelligent controller antennas at 90°.
Turning on the Battery
Press and hold the power button for more than two seconds to turn on or off.
Operating the S1 Using a Mobile Device
Connecting to the App
The S1 must be connected to the RoboMaster app in order to use.
Selecting a Location
It is recommended to use the S1 on flat surfaces such as wooden floors and carpets. Uneven surfaces such as sand or rocks may damage the wheels or motors.
Using Solo Mode
Enter Solo mode to see the page below.
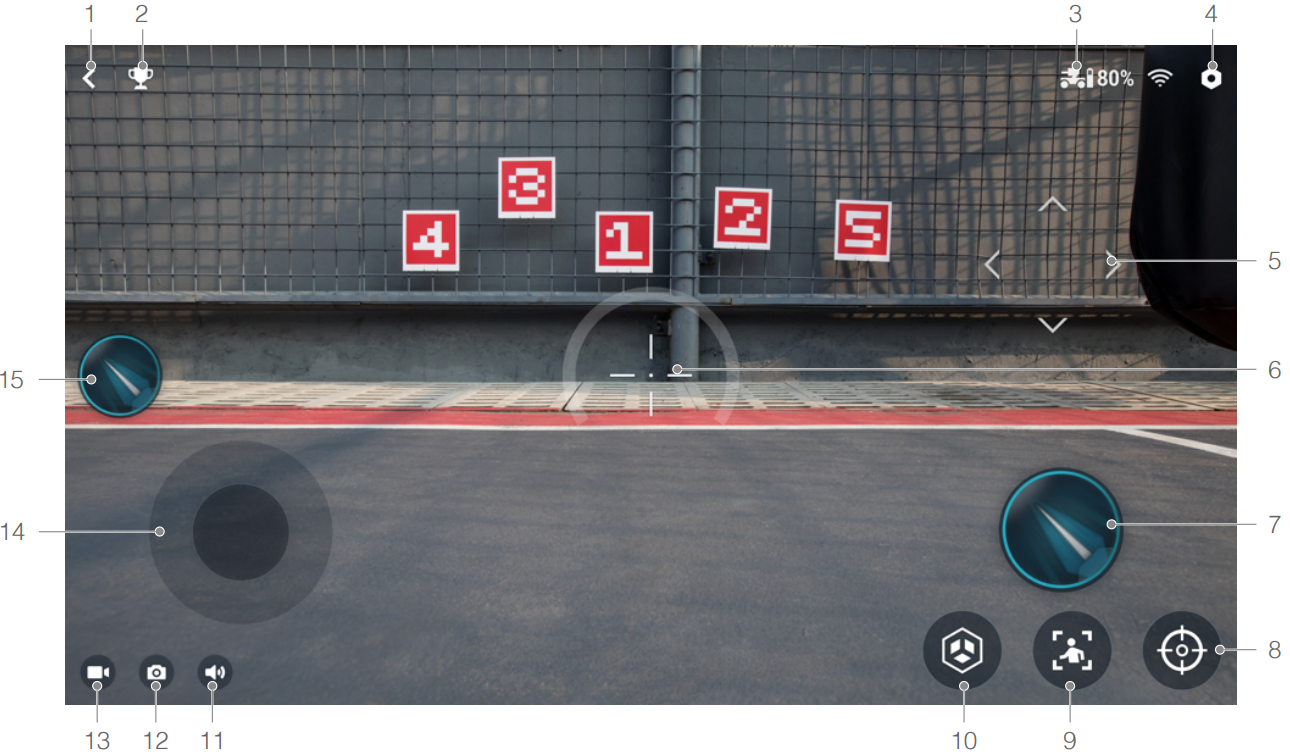
- Back button: Tap to return to the home page.
- Solo mode games button: Tap to enter Target Practice or Target Race.
- Connection status button: Tap to see how to connect the S1 and the app.
- Settings button: Tap to enter the Settings page.
- Gimbal slider: Tap and slide on this area of the screen to control the rotation of the gimbal.
- Sight: Used to aim at targets.
- Launch button: Tap to launch gel beads or emit an infrared beam.
- Zoom button: Tap to zoom in or out 4x.
- Follow mode: Tap to enter Follow mode.
Note that the Follow mode will be affected in the following situations:- The person being followed is partly or completely obstructed.
- The person being followed suddenly changes their movement dramatically.
- The environment suddenly changes from light to dark, or vice versa.
- The color or pattern of the person being followed is similar to the environment.
- Custom skills button: Tap to perform preprogrammed custom skills.
- Mute button: Tap to mute or unmute the sound on the mobile device.
- Shutter button: Tap to capture a photo.
- Record button: Tap to record a video.
- Chassis control button: Tap to move the chassis.
- Launch button: Tap to launch gel beads or emit an infrared beam.
The camera view is mainly used to control the chassis, gimbal, and blaster of the S1.
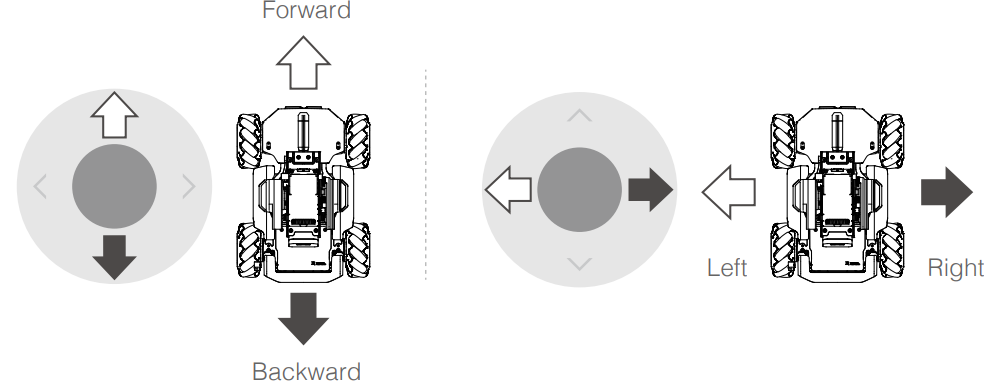
Controlling the Chassis
Tap the chassis control button to move the S1 forward, backward, or sideward. The launch button can be tapped at the same time to launch gel beads or emit infrared beams while moving the chassis.
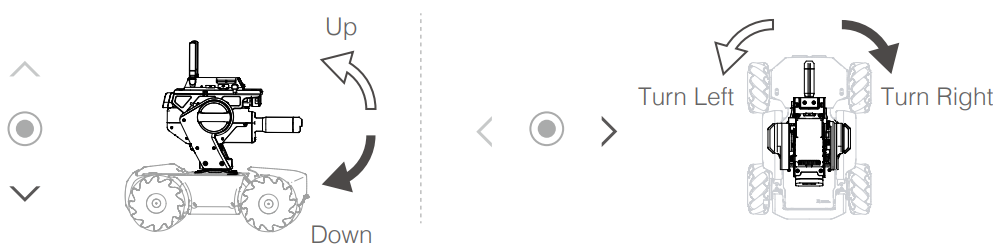
Controlling the Gimbal
Tap on the right side of the screen to rotate the yaw and pitch of the gimbal. The launch button can be tapped at the same time to launch gel beads or emit infrared beams while rotating the gimbal.
WARNING: DO NOT aim the blaster at people or animals when launching the gel beads. DO NOT point the launch trajectory light at yours or other people's eyes.
- Measured in an interference-free and unobstructed environment with a distance of approximately one meter between the mobile device, the router, and the S1. The iOS device used was an iPhone X. The results of testing with different Android device may be different.
- Outdoor use of the 5.1 GHz and 5.8 GHz frequency bands is prohibited in some areas. Always follow all local laws and regulations in your country or region.
- Measured in an interference-free and unobstructed environment.
For Connection via Wi-Fi, the mobile device used for testing was a sixth-generation iPad (released in 2018). For Connection via Router, several router models were used for testing.
FCC: TP-Link Archer C9; SRRC: TP-Link WDR8600;
CE: TP-Link Archer C7; MIC: WSR-1160DHP3. - Use of the infrared units will be affected in outdoor or infrared-intensive environment.
- The gel beads will swell to a usable size after being soaked in water for four hours.
Setup Guide
To set up the RoboMaster S1, follow these steps:
- Unboxing & Assembly: Carefully unpack all components and assemble the robot according to the provided manual.
- Software Installation: Download and install the DJI RoboMaster app or SDK on your computer/tablet.
- Pairing: Connect the robot to your device via Wi-Fi or Bluetooth.
- Calibration: Calibrate the sensors and vision system using the app's guided calibration process.
- Programming: Start with basic coding exercises using Scratch 3.0 or move to advanced programming with Python.
Firmware Update
Check the S1 firmware version in Settings, then System, and then Firmware Update. If there is a new firmware version, use the RoboMaster app to update the firmware of the S1.
- Make sure that all parts are connected, power on the S1, and check to make sure the battery level is above 50%.
- Tap App, then System, and then Firmware Update. Follow the onscreen instructions to update the firmware. Make sure the mobile device is connected to the internet when downloading the firmware.
- The S1 tracks the progress of the update using audio prompts. Wait until the update is complete.
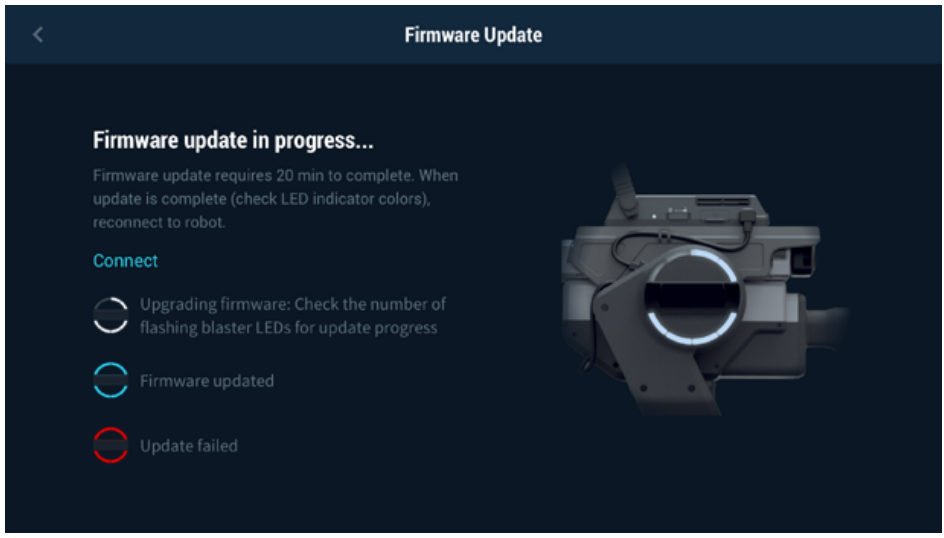
WARNING
- The battery firmware is included in the S1 firmware. Make sure to update the firmware of all batteries if you have several.
- Only start a firmware update if the battery level is above 50%.
- Note that while updating the firmware of the S1, the gimbal may go limp, the status indicators may blink abnormally, and the S1 may reboot.
- The S1 and app may disconnect after updating. If this occurs, reconnect them.
- If you receive a prompt that newer firmware version is out of date, update and try again.
- When in Battle mode, make sure that all the 1s are using the same firmware version.
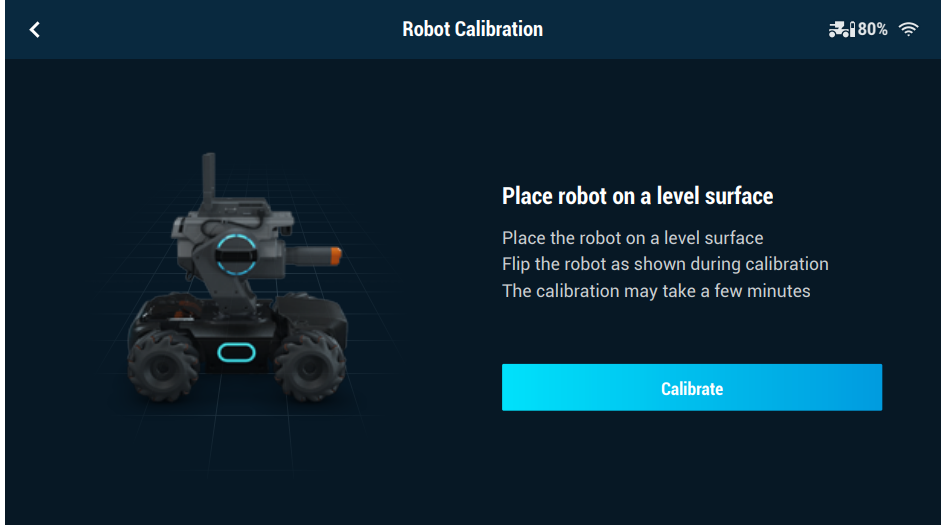
Calibrating the S1
If any of the following scenarios occur, recalibrate the S1 in the RoboMaster app:
- The pitch angle is not horizontal after performing the gimbal self-test.
- The gimbal attitude cannot be controlled precisely.
- The pitch cannot rotate horizontally when the yaw is controlled separately.
- The gimbal drifts when there is no operation or when the operation is stopped.
- The S1 moves involuntarily while rotating.
- The chassis is uncontrollable and the gimbal goes limp when warning prompts appear in the app.
- The motion controller has been installed or reinstalled.
The specific calibration steps are as below:
- Open the RoboMaster app, tap on Settings, then System, and select Calibration.
- Follow the steps in the app to calibrate.
Setting the PWM Ports
- PWM (pulse width modulation) controls the duration of a high level of output during a certain period, and is broadly used to control LEDs, navigation gears, and more. The S1 PWM port has a default duty cycle of 7.5% and a fundamental frequency of 50 Hz.
- For LEDs, the PWM output rate ranges from 0% to 100%, with 0% corresponding to an LED's lowest brightness and 100% to its highest brightness. For navigation gears, the PWM output rate ranges from 2.5% to 12.5%.
- You can set the navigation gear PWM output percentage based on the rotation angles you wish to control
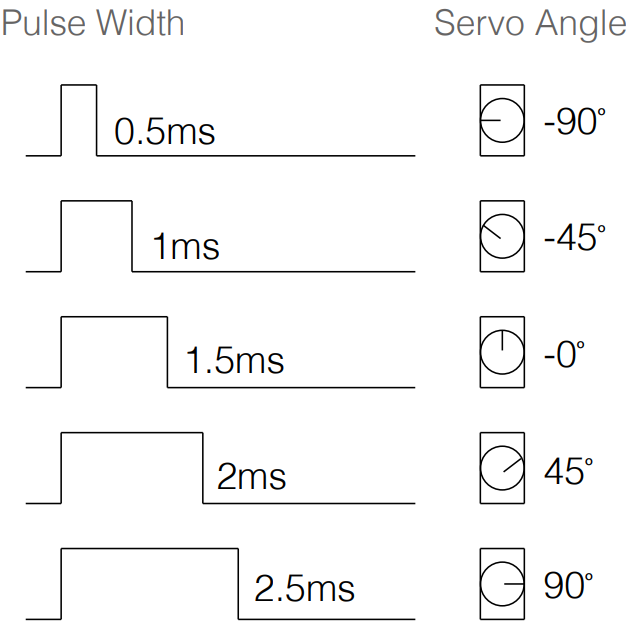
NOTE: Each time the custom program or Python program finishes running, the PWM port output signal will be set to its default setting, which is 50 Hz and the duty cycle is 7.5%.
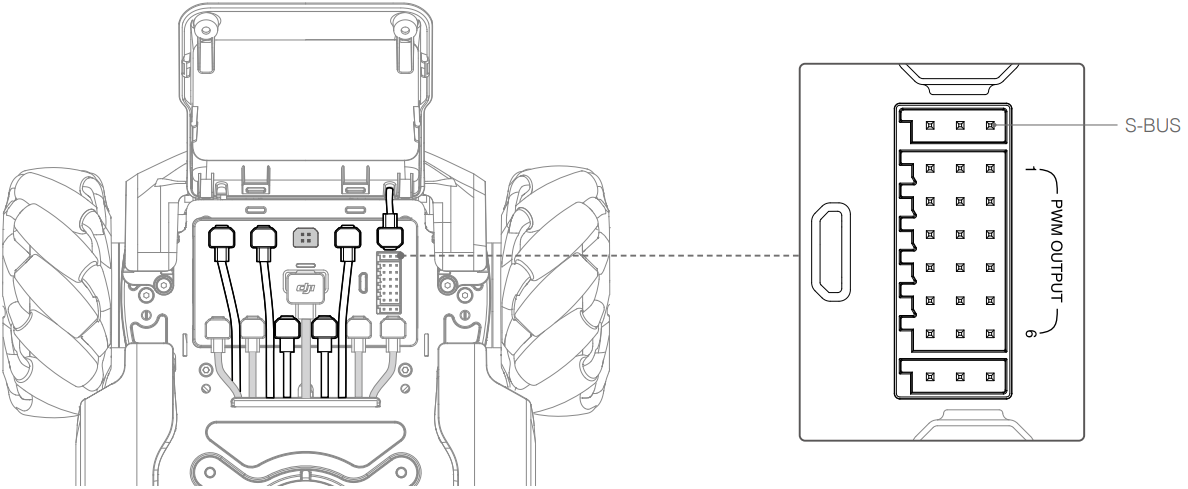
Using S-Bus Port
S1 firmware v00.05.0046 or later is required to use the S-Bus port. A remote controller that supports the S-Bus protocol can be used to control the S1 by connecting to the S-Bus port of the S1 Motion Controller. Users must prepare their own receiver and remote controller. It is recommended to use a Futaba R6303SB receiver.
Connection
Connect the S-Bus port of the S1 Motion Controller to the S-Bus port of the receiver by using the 3-pin servo cable.
Usage
Make sure the remote controller has been linked with the receiver before use. Refer to the manual documents of the receiver for more information on linking methods.
The correspondence of control channels of the S-Bus port of the S1 Motion Controller are shown below. Refer to the manual documents of the remote controller to complete the channel mapping between the receiver and remote controller.
S-Bus Port Control Channels |
Chassis Lead Mode |
Free Mode | Recommended Remote Controller Channel | |||
Remote Controller Channel |
Offset |
Status | ||||
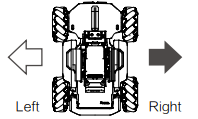
Channel 1 |
Move the chassis sideward |
Move the chassis sideward | Control Stick Panel 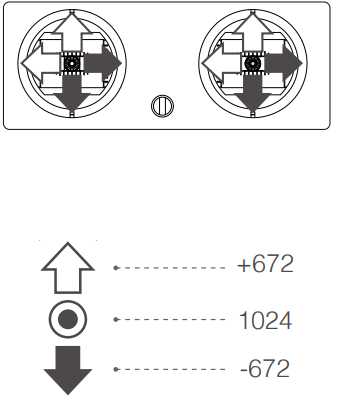
|  | ||
Channel 2 |
Move the chassisforward and backward |
Move the chassisforward and backward | 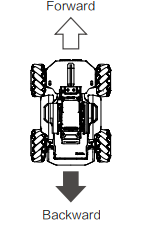 | |||
Channel 3 |
Control the pitchof the gimbal |
/ | 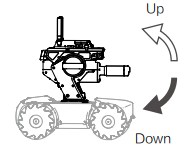 | |||
Channel 4 |
Control the yaw of the gimbal |
Control the yaw of thechassis | 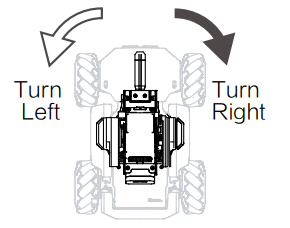 | 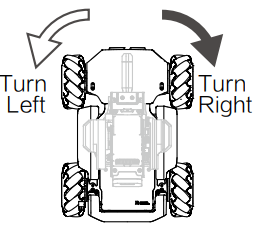 | ||
Channel 5 |
Control the movement speed of the chassis andthere are threeoptional speeds: Fast Medium Slow | 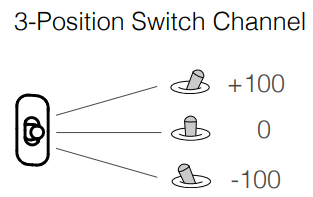 |
Fast | |||
Medium | ||||||
Slow | ||||||
Channel 6 |
Switch the chassis mode and there are twooptional modes: Chassis Lead mode Free mode | 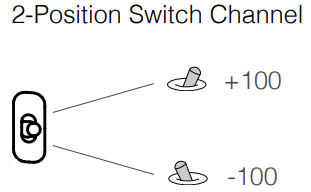 |
Chassis Lead mode | |||
Free mode | ||||||
Channel 7 |
Control the release of the chassis and there are two statuses:Chassis is set when it produces output torque Chassis is released when it not producing output torque | 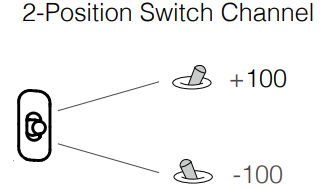 |
Set | |||
Release | ||||||
DJI RoboMaster S1 Troubleshooting
If you encounter issues with your RoboMaster S1, here are some common problems and solutions:
- Connection Issues: Ensure that the robot is properly paired with your device. Restart both devices if necessary.
- Sensor Malfunction: Clean any debris from sensors and recalibrate if needed.
- Programming Errors: Check code syntax and ensure that programs are saved correctly before uploading to the robot.
Instructions & Warnings
- Battery Safety: Avoid overcharging or using damaged batteries.
- Handling Carefully: The robot has moving parts; handle with caution to avoid injury.
Pros & Cons
Pros
- Comprehensive Educational Resources: Detailed curriculum and extensive support materials.
- Modular Design: Highly customizable for various learning objectives.
- Advanced Features: Computer vision, sensor arrays, and customizable SDK.
- User-Friendly Interface: Easy-to-use app and intuitive programming tools.
Cons
- High Cost: Priced at around $500, which may be prohibitive for some users.
- Complex Assembly: Requires careful assembly; may be challenging for younger users without supervision.
- Steep Learning Curve: Advanced features require significant time to master.
Customer Reviews
Customers have praised the RoboMaster S1 for its innovative approach to STEM education. Many reviewers appreciate its robust build quality and comprehensive educational resources. However, some users have noted that the initial setup can be complex and time-consuming. Some common complaints include issues with connectivity and sensor calibration.
Faqs
What is the DJI RoboMaster S1 designed for?
What programming languages are supported by the RoboMaster S1?
How long does the battery last on the RoboMaster S1?
Can I customize my RoboMaster S1?
What kind of sensors does the RoboMaster S1 come with?
Is there an app available for controlling the RoboMaster S1?
How do I calibrate my RoboMaster S1's sensors?
Can I use my RoboMaster S1 in various environmental conditions?
What kind of educational resources come with the RoboMaster S1?
How much does the RoboMaster S1 cost?
Leave a Comment